タグ コンピュータエンターテインメント が登録されている動画 : 31 件中 1 - 31 件目
種類:
- タグ
- キーワード
対象:
【CEDEC2012】床大画面エクサテインメントの開発
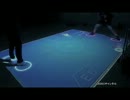
床大画面マルチタッチシステムを利用したエクサテインメントシステムの設計および制作を行った.このシステムは、プロジェクタにより生成した床の大画面に,測域センサによるマルチタッチ機能とマルチジェスチャ機能を付加したシステムである.通常の床に投映できるため,激しく動いたり飛び跳ねたりする動作が可能となり,この特徴をエクサテインメントに応用した.システムには心拍計のリアルタイム計測も組み込まれており,フィジカルトレーニングやフィットネス効果の検討もなされている. http://cedec.cesa.or.jp/2012/program/INT/C12_P0220.html
【CEDEC2012】「エースコンバット アサルト・ホライゾン」における、音声データ編集フロー省力化の事例

ゲームオーディオの開発現場で恒常的に発生する音声データの編集作業。ハードウェアのDSP処理能力が向上したとは言え、ダイナミクスレンジ調整や質感補正、無線音声やクリーチャー加工などのプリプロセス工程が無くなることは(まだ)なさそうです。本セッションでは、この、どちらかと言えば機械的かつPCリソースを占有しがちな「プリプロセス工程」に着目・分析し、サウンドデザイナーのスキルやセンスが必要な作業「以外」の工程を極力省力化・自動化しようという試みを、一部映像をまじえてご紹介します。 (株式会社バンダイナムコゲームス 高橋 みなも) http://cedil.cesa.or.jp/session/detail/
【『ゲームのお仕事』業界研究フェア2011 】人材育成の取り組みについて

【セッション概要】バンダイナムコゲームスとトライエースの人事担当者より、新入社員の仕事紹介を含め、パブリッシャー、デベロッパーというそれぞれの立場から、どのような考えで人材育成について取り組んでいるか紹介します。[CEDiL]http://cedil.cesa.or.jp/demo/session/detail/723
【『ゲームのお仕事』業界研究フェア2011 】仕事紹介 ~ すべての仕事に役立つ「広報の仕事内容」 ~

【セッション概要】広報、法務、営業など管理系職種はどんな仕事をしているの? 聞きなれた職種名でも具体的な仕事内容を正しく理解していますか? ゲーム業界で仕事をしている、様々な職種の方の仕事内容を、広報担当者の視点から紹介します。 [CEDiL]http://cedil.cesa.or.jp/demo/session/detail/722
【『ゲームのお仕事』業界研究フェア2011 】仕事紹介 ~ 縁の下の力持ち:開発サポート ~

【セッション概要】聞きなれた職種名でも具体的な仕事内容を正しく理解していますか?各分野のスペシャリストが仕事内容を紹介します。当セッションでは、開発業務には欠かせない縁の下の力持ち、開発サポートという仕事を取り扱います。 [CEDiL]http://cedil.cesa.or.jp/demo/session/detail/720
【『ゲームのお仕事』業界研究フェア2011 】海外のゲーム市場は今! (Part 2)

【セッション概要】海外の動向を気にしていますか? 欧米をはじめとする国際動向について海外視点からお話しします。[CEDiL]http://cedil.cesa.or.jp/demo/session/detail/727
【『ゲームのお仕事』業界研究フェア2011 】CEDECからのメッセージ

【セッション概要】皆さんが参加される「業界研究フェア」は、日本最大のコンピュータエンターテインメント開発者カンファレンス「CEDEC 2011」の併催イベントです。CEDEC 運営委員長の吉岡直人と、業界研究フェア実行委員長の藤村幹雄の対談形式で、CEDEC が目指すもの、将来に対する考えなどをお話しします。 [CEDiL]http://cedil.cesa.or.jp/demo/session/detail/726
【『ゲームのお仕事』業界研究フェア2011 】海外のゲーム市場は今! (Part 1)

【セッション概要】海外の動向を気にしていますか? アジアをはじめとする国際動向について日本視点からお話しします。[CEDiL]http://cedil.cesa.or.jp/demo/session/detail/716
【『ゲームのお仕事』業界研究フェア2011 】仕事紹介 ~ プログラミング&ゲームデザイン ~

【セッション概要】聞きなれた職種名でも具体的な仕事内容を正しく理解していますか?各分野のスペシャリストが仕事内容を紹介します。当セッションでは、プログラミングとゲームデザイン分野を取り扱います。 【CEDiL】http://cedil.cesa.or.jp/demo/session/detail/715
【『ゲームのお仕事』業界研究フェア2011 】ゲーム業界人事担当者対談 2011 (Part 1)

【セッション概要】このセッションでは3社の人事担当者が、各社の実例などを交え、ゲーム業界で働く人の実像についてざっくばらんにお話しします。 見る人の価値観や方向性により、求められる人材像は変わってきます。ゲーム開発という仕事を人事担当者はどう見ているのか、就職を考えている学生に求めたい事などを、人事担当者の視点でお話しします。 ゲーム業界にちょっと興味はあるけれど...という方から、まさに就職活動中の方まで、ぜひお越しください。【CEDiL】http://cedil.cesa.or.jp/demo/session/detail/721
【CEDEC2011】インパルスベースのお手軽剛体シミュレーション実装
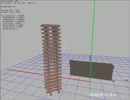
本講演では、剛体の物理挙動(衝突応答)をインパルスを計算・適用することで解決する手法について述べる。積分処理は基本的なオイラー法を前提とし、コリジョンシステムにより毎フレーム生成される衝突点は衝突ペアごとに1点だけ、という比較的単純な制約の上で動作する剛体エンジンの実装を目的とし、扱う手法の簡潔さと合わせて、理論の把握だけでなく実装への確かな手ごたえを掴めることが本公演の最大の特徴である。(株式会社バンダイナムコゲームス 小林 弘幸) http://cedil.cesa.or.jp/session/detail/675
【CEDEC2011】AR(拡張現実;Augmented Reality)ゲーム開発のためのアドバイス(題材:PS3EyePet)

PS3のAR(拡張現実)ゲームタイトル『EyePet(Me and my Pet)』の開発に関する、視覚的情報が豊富で理解しやすいプレゼンテーション。プレゼンテーションを通して、AR(拡張現実)ゲームの設計/アート/技術上の決断をする上で有用な情報を提供する。 (株式会社 ソニー・コンピュータエンタテインメント ドウセ ニコラ) http://cedil.cesa.or.jp/demo/session/detail/678
【CEDEC2007】後退して味方同士で合流し再び前進するAI(「マルチエージェント」ムービー5)

このアルゴリズムは敵と出会った場合、敵戦力が味方戦力を上回っていれば、一旦味方と合流し戦力を立て直すアルゴリズムです。このデモでは突進した2体が敵チームと遭遇し、敵戦力が大きく味方戦力を上回ると判断し、後方にいる味方と一旦合流してから再び前進します。AI同士が合流するには「合流」というゴールを使います。このゴールの中身はくり返し合流対象のAIに対してパス検索をかけて近づく仕様になっており、たとえ合流対象のAIが移動していても最終的に合流できるようになっています。合流する場合は、一体のAIを合流対象と決めて「合流」ゴールを設定します。(CEDEC2007「エージェント・アーキテクチャーから作るキャラクターAI」三宅 陽一郎)http://cedil.cesa.or.jp/session/detail/89
【CEDEC2007】ゲームの概要全体解説用の動画(「マルチエージェント」ムービー9)

ゲームの概要全体解説用の動画です。(CEDEC 2007「エージェント・アーキテクチャーから作るキャラクターAI」三宅 陽一郎)http://cedil.cesa.or.jp/session/detail/89
【CEDEC2007】味方基地へ帰還(「マルチエージェント」ムービー8)

敵との戦力差から「味方基地へ帰還」ゴールを選択します。合流する味方がいない場合は、このゴールが選択される場合があります。(CEDEC2007「エージェント・アーキテクチャーから作るキャラクターAI」三宅 陽一郎)http://cedil.cesa.or.jp/session/detail/89
【CEDEC2007】後退するAI (「マルチエージェント」ムービー7)

突進してしまったAI(手前)が3体の相手(右奥に出現)と遭遇し、後退して味方と合流しつつ反撃します。(CEDEC2007「エージェント・アーキテクチャーから作るキャラクターAI」三宅 陽一郎)http://cedil.cesa.or.jp/session/detail/89
【CEDEC2007】自律型AIチーム対戦デモ(「マルチエージェント」ムービー6)

AIチームとAIチームの対戦デモです。自律型エージェントたちがチームを組んで対戦します。(CEDEC2007「エージェント・アーキテクチャーから作るキャラクターAI」三宅 陽一郎)http://cedil.cesa.or.jp/session/detail/89
【CEDEC2007】味方の救援に駆けつけるAI (「マルチエージェント」ムービー4)

戦闘力が弱くなった窮地に陥った味方を救援しに行きます。「味方を救援する」というゴールは「味方の近くまで行く」「味方の近くの敵を攻撃する」に分解されます。このデモの場合、攻撃力のない味方の周りをまわって周囲の敵を攻撃します。(CEDEC2007「エージェント・アーキテクチャーから作るキャラクターAI」三宅 陽一郎)http://cedil.cesa.or.jp/session/detail/89
【CEDEC2007】味方を護衛するAI(2) (「マルチエージェント」ムービー3)

護衛すると決めた味方を常に追跡しながら進みます。護衛対象の周囲に敵がいる場合、攻撃しながら追跡します。左上に表示されているのがゴール指向プランニングのゴール分解表示です。(CEDEC2007「エージェント・アーキテクチャーから作るキャラクターAI」三宅 陽一郎)http://cedil.cesa.or.jp/session/detail/89
【CEDEC2007】味方を護衛するAI(1) (「マルチエージェント」ムービー2)

護衛すると決めた味方を常に追跡しながら進みます。左上に表示されているのがゴール指向プランニングのゴール分解表示です。「護衛」というゴールを選択し、その達成に必要なゴールに分解されています。(CEDEC2007「エージェント・アーキテクチャーから作るキャラクターAI」三宅 陽一郎)http://cedil.cesa.or.jp/session/detail/89
【CEDEC2007】敵ターゲッティング(集中砲火) (「マルチエージェント」ムービー1)

複数対複数の戦闘の場合、戦力を分散するより集中して各個撃破した方が効率がよいことが経験的に知られています。そこで、クロムハウンズにおいても、複数の敵と出会った場合、最も戦力の弱い敵に攻撃を集中します。このデモは、AIチーム対AIチームの戦闘デモで、全てのAIはゴール指向プランニングによって自律的に動作しており、その上でチーム的な協調として敵ターゲットを共有します。敵一体に攻撃を集中して各個撃破して行く様子が見れます。(CEDEC2007「エージェント・アーキテクチャーから作るキャラクターAI」三宅 陽一郎)http://cedil.cesa.or.jp/session/detail/89
【CEDEC2006】ゴール指向プランニング (「クロムハウンズAI」ムービー1)

ゴール指向プランニングはまずゴールを決定し、その達成にステップとして必要なより小さなゴールへ分解して行きます(左上にゴール分解のデバッグ表示)。このデモでは「敵の通信塔を占拠する」というゴールを設定し、それを達成するためのより小さなゴールへ分解します。そして、その小さなゴールを順番に達成して行くことで全体のゴールを達成します。例えばここでは「敵の通信塔を占拠する」を「通信塔へ行く」「そこに留まる」という小ゴールへ分解して順番に達成しています。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎)http://cedil.cesa.or.jp/session/detail/50
【CEDEC2006】チームAIシステム (「クロムハウンズAI」ムービー7)

各AIは自律的に行動しています。しかしまとまりがありません。そこでチームAIという司令部のようなAIを構築します。チームAIは4つの戦略を持ち全体の局面から一つの戦略を評価値によって決定します(画面左にチームAIの4つの戦略評価値)。一つの戦略は各AIが果たす複数の司令(=ゴール)を持っており、チームAIはそのゴールを適切なAIに割り振ります。各AIはそのゴールに従うか従わないかを判断します。このデモではAIはずっとチームからの司令を拒絶していますが、ある時点で受諾します(デバッグ画面の緑色で書かれたゴールがそうです)。最後の方でAIたちが協調して敵基地を攻撃するのが見れます。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎)http://cedil.cesa.or.jp/session/detail/50
【CEDEC2006】意思決定システム「複数の戦略ゴールに評価値をつけて選択する」(「クロムハウンズAI」ムービー6)

自律型エージェントとは自分自身で意思決定をし、自分の身体で活動するAIです。自分自身で意思決定する以上、どこかで自分の行動を決定しなければなりません。クロムハウンズでは、戦略ゴールを一つ選択する、ということが意思決定となります。戦略ゴールが決定されれば、ゴール指向プランニングアルゴリズムが自動的に小ゴールに分解して行きます。このデモでは戦略ゴールの評価値を計算したリストをお見せします。クロムハウンズAIではその中から最も高い評価値を持つ戦略ゴールを選択します。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎)http://cedil.cesa.or.jp/session/detail/50
【CEDEC2006】自律型AIチーム対戦デモ~終盤~ (「クロムハウンズAI」ムービー10)

これはデモとして、完全に自律型AIたちだけで対戦させたらどうなるか?を実験した動画です(終盤)。8分を超えるAI同士の戦闘は、ほぼ収束に向かいつつあります。最後は、前線に出て来たAIたちで勝負が着きます。このようにAIたちだけで戦場が形成できれば、「人間チームとAIチームが対戦」「人間とAIの混成チームが対戦」「指揮官としてAIに指示を出して対戦」など様々なゲームデザインの可能性が拓けて来ます。AI技術はゲームデザインと密接な関係を持ち、新しいゲームデザインの為の足場を提供します。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎)http://cedil.cesa.or.jp/session/detail/50
【CEDEC2006】自律型AIチーム対戦デモ~中盤~ (「クロムハウンズAI」ムービー9)

これはデモとして、完全に自律型AIたちだけで対戦させたらどうなるか?を実験した動画です(中盤)。各AIは、自分の機体構成を認識して、足が早く攻撃力のある者は前線へ、重量タイプの砲撃型は後方から長距離砲で支援します。パス検索システムによって広範囲の戦闘領域が、ゴール指向型プランニングによって長時間に渡る戦略的な行動が、即応プランニングによって短時間の戦闘が構成されています。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎)http://cedil.cesa.or.jp/session/detail/50
【CEDEC2006】自律型AIチーム対戦デモ~序盤~ (「クロムハウンズAI」ムービー8)

これはデモとして、完全に自律型AIたちだけで対戦させたらどうなるか?を実験した動画です(序盤)。自律型AI同士がチームを組んで対戦します。AI開発者としても毎回、どんな戦闘になるか想像できません。自律的に戦闘や戦場が形成されて行きます。まずは出発から遭遇戦までです。このようにパス検索とゴール指向プランニングを組み合わせれば長期的なゲームの場面を形成することが可能です。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎http://cedil.cesa.or.jp/session/detail/50
【CEDEC2006】リアルタイム・ゴール指向プランニング(2) (「クロムハウンズAI」ムービー3)

ゴール指向プランニングはリアルタイムに突発的な事態に対する対応として、新しいプランを作成します。これを「即応プランニング」と言います。クロムハウンズでは、これを「ゴールを挿入する」ことで実現します。「敵基地を制圧する」というゴールを達成しようとしている最中に敵と遭遇した場合、一旦、現在のゴールはサスペンドしておいて(左上デバッグ画面で黒くなる)、「敵を戦う」ゴールが挿入されます。「敵と戦う」ゴールは周囲の敵を殲滅するか、一定時間後に解除され、もとの「敵基地を制圧する」ゴールに戻ります。まだ敵が周囲にいる場合は、再び「敵と戦う」ゴールが挿入されます。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎)http://cedil.cesa.or.jp/session/detail/50
【CEDEC2006】リアルタイム・ゴール指向プランニング(1) (「クロムハウンズAI」ムービー2)

ゴール指向プランニングは大きな一つのゴールを達成するために、状況に応じてゴールを分解し、分解したゴールを順番に達成して行くアルゴリズムです。しかし、その欠点は、突発的な事象に、例えば、敵と偶然出会ってしまった時の事態にそのままでは応戦できないところです。そこで、特別に、別のゴールための実行中でも、「敵を攻撃する」というゴールを、ゴール・シークエンスの中に挿入できるようにしています。このデモでは「敵を攻撃する」ゴールは敵と遭遇して時点で挿入され、15秒後に自動的に削除され、敵がまだ周囲にいれば再び挿入されます。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎)http://cedil.cesa.or.jp/session/detail/50
【CEDEC2006】パス検索システム(「クロムハウンズAI」ムービー4)

パス検索システムは、パスデータ(ここではナビゲーション・メッシュ)上でリアルタイム・パス検索を行うことでパスを導き出し、それを辿ることによって、任意のポイントからポイントへの移動を可能にするシステムです。例えば、このデモでは複雑な市街地において、目的地までのパスを計算によって導き出しフォローすることで移動しています。実際パス検索だけで完全というわけでなく、細かな地形へひっかからないように対応するために衝突回避アルゴリズムを多重に入れてあります。パス検索システムによってAIは複雑で広い環境で活躍することが出来るようになり、長時間の活動も可能になります。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎)http://cedil.cesa.or.jp/session/detail/50
【CEDEC2006】ナビゲーション・メッシュ(「クロムハウンズAI」ムービー5)

ナビゲーション・メッシュとは単位多角形(普通は三角形)同士がリンクしたデータのことです。この上で、始点と目的地を指定してA*アルゴリズムを走らせると、最短パスが導かれます。ナビゲーション・メッシュに地形の地表情報が埋め込んでおくと、状況に応じて地表の状況を考慮に入れたパス検索を行うことが可能になります。例えば、水のあるメッシュ、砂のメッシュ、崖近くのメッシュ、など様々な地形情報をメッシュ埋め込んでA*検索のコストに盛り込むことで、地形を考慮に入れた「知性的なパス」を導くことが可能となります。デモの途中で、埋め込まれたデータを色を分けて表示しています。(CEDEC2006「クロムハウンズにおける人工知能開発から見るゲームAIの展望」三宅陽一郎)http://cedil.cesa.or.jp/session/detail/50